Download Velocity analysis and more Study Guides, Projects, Research Physics in PDF only on Docsity!
Velocity analysis
-^ To determine the velocities of different pointson links of a mechanism for a given inputmotion. Determination of the motioncharacteristics of links in a mechanism isrequired for the force analysis •^ Velocities of links and of points of mechanism•^ Velocities of links and of points of mechanism^ can be determined by different methods.^ 1. Relative velocity method or velocity polygonmethod2. Instantaneous centre method.
Velocity of link
-^ In order to determine the relative motion ofthe ends of a link, one of the ends isassumed to be moving relative to the otherend. •^ Let a link
AB^ rotate about
A^ in anti-clockwise
direction such that the end
B^ rotates relative
A
direction such that the end
B^ rotates relative
to^ A. • Then the direction of relative motion of
B
with respect to
A^ is perpendicular to
AB.
-^ Therefore, the direction of relative velocity ofa point w.r.t any other point on a link isalways along perpendicular to the straightline joining the two points.
B
Velocity of link…
•^ Hence, the point
c^ divides the vector
ab^ in the
same ratio as the point
C^ divides the link
AB.
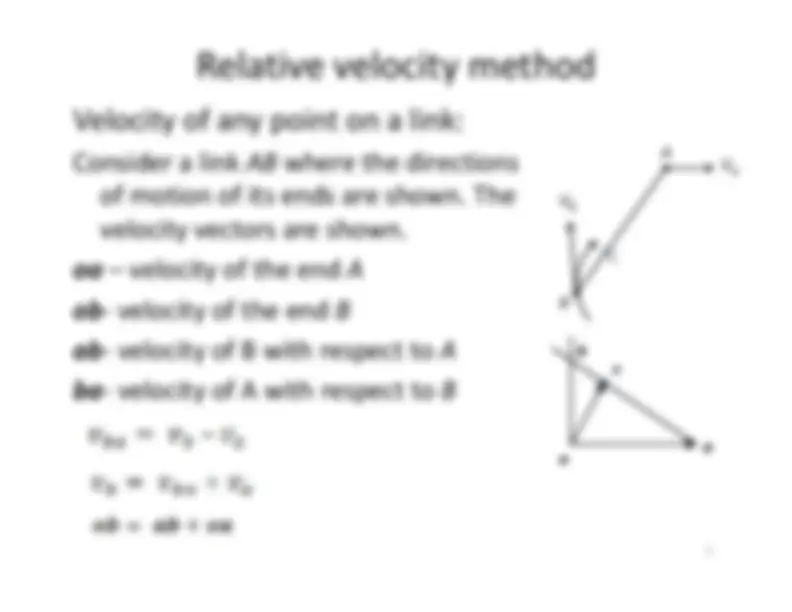
Relative velocity method
Velocity of any point on a link: Consider a link
AB^ where the directions
of motion of its ends are shown. Thevelocity vectors are shown. oa^ – velocity of the end
A
ob -^ velocity of the end
B^
B
A^ V C
A VB
ob -^ velocity of the end
B
ab - velocity of B with respect to
A
ba - velocity of A with respect to
B
B o^
a b^ c
5
Velocity diagram for four bar chain b
a, d
(i)
b^
(i)^ Draw a vector
ab^ perpendicular to the
Given the dimensions of al l the links,angular velocity of the crank AB andposition of the crank. Draw configurationdiagram.
D
A
C B θ
a, d
b
(ii)^ a, d
b^ c
(iii)
(i)^ Draw a vector
ab^ perpendicular to the
link^ AB^
of length
AB x ω
(to a suitable
scale).(ii) Draw a vector line through
b^ in
direction perpendicular to the link
BC.
(iii) Draw a vector through d in a directionperpendicular to the link
CD.^ This will
intersect the vector through in
c.
(iv) The vector
bc^ represents velocity of
point C w.r.t point B.
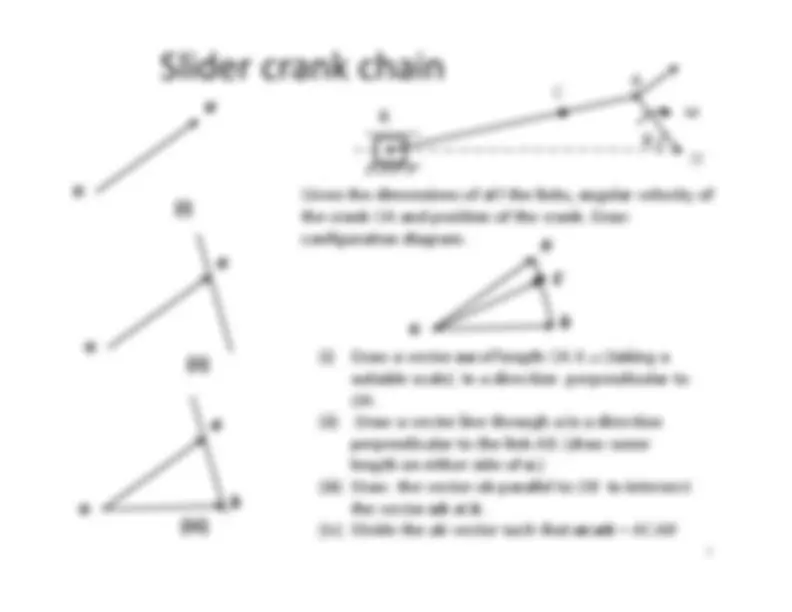
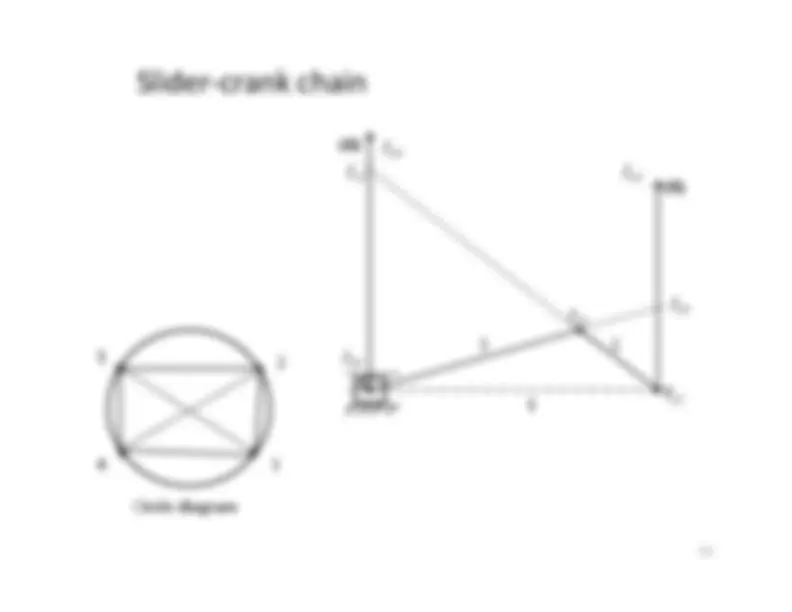
Slider crank chain
o
a (i)^ a^
a^ c
Given the dimensions of al l the links, angular velocity ofthe crank OA and position of the crank. Drawconfiguration diagram.
A^ O
B^
ω C
θ
o^
(ii)
o
a^ b (iii)
o^
b
(i)^ Draw a vector
oa^ of length OA X
ω^ (taking a
suitable scale) in a direction perpendicular to OA. (ii) Draw a vector line through a in a directionperpendicular to the link
AB. (draw some length on either side of
a .)
(iii) Draw the vector ob parallel to
OB^ to intersect
the vector
ab^ at^ b. (iv) Divide the ab vector such that
ac : ab^ =^ AC
: AB^8
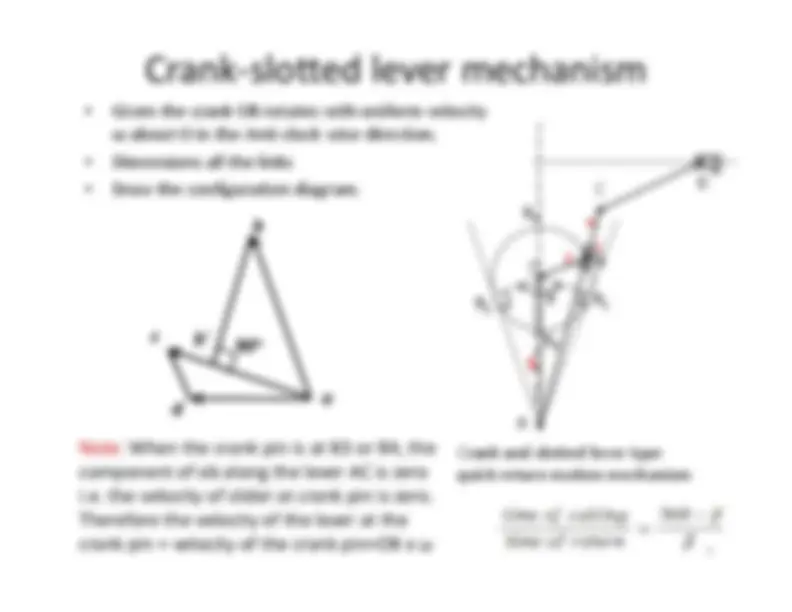
-^ Since no component of the velocity of the crank pin is used tomove the slider, whole the velocity of the crank at crank pinwill be used to move the lever and hence, the velocity of leverand velocity of tool at these positions (B
, B) are 34
maximum(neglecting obliquity of link CD). • Maximum velocity of cutting = maximum velocity of C whencrank pin is at B
Questions
1.For an inline slider-crank mechanism, the length of thecrank and connecting rod are 3 m and 4 m, respectively. Atthe instant when the connecting rod is perpendicular to thecrank, if the velocity of the slider is 1 m/s, the magnitude ofangular velocity (upto 3 decimal points accuracy) of the crankis _________radian/s.
Solution:
o 90 A^ O
B
o a
θ
b^90
o
θ θ
3 m 4 m 5 m
m/s
Solution:^ OA x ω=0.8 m/s^ ω=0.8/3=0.2667 rad/s
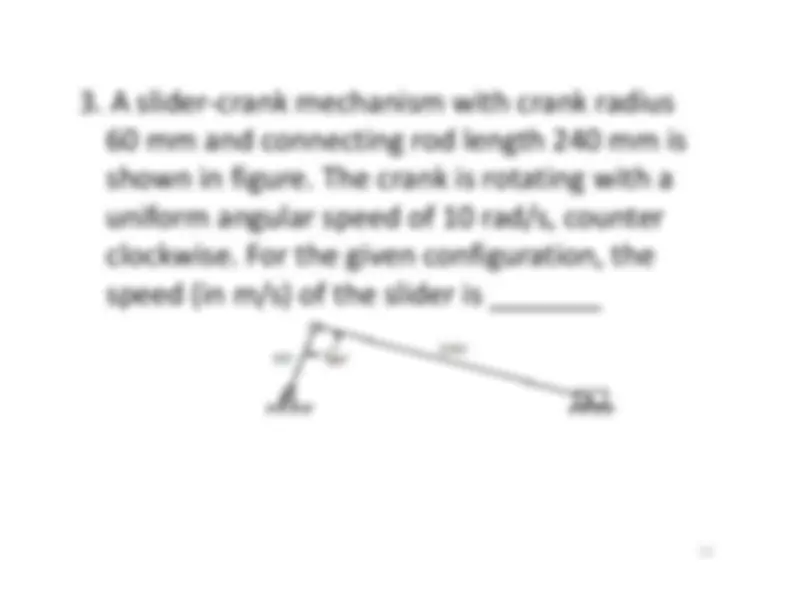
- A slider-crank mechanism with crank radius60 mm and connecting rod length 240 mm isshown in figure. The crank is rotating with auniform angular speed of 10 rad/s, counterclockwise. For the given configuration, the^ speed (in m/s) of the slider is _______speed (in m/s) of the slider is _______
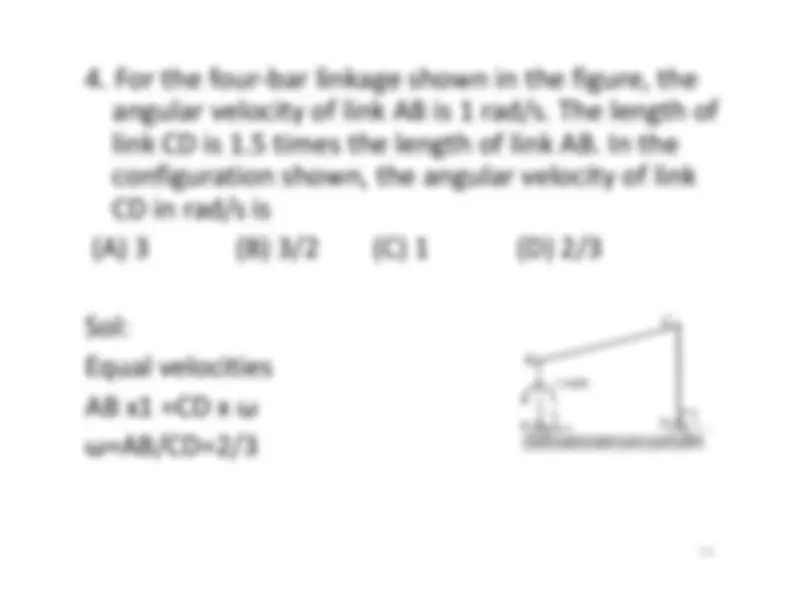
- For the four-bar linkage shown in the figure, theangular velocity of link AB is 1 rad/s. The length oflink CD is 1.5 times the length of link AB. In theconfiguration shown, the angular velocity of linkCD in rad/s is(A)
- (B) 3/
- (C)
- (D) 2/
- Sol:Equal velocitiesAB x1 =CD x ωω=AB/CD=2/
- For the configuration shown, the angular velocity oflink AB is 10 rad/s counterclockwise. The magnitude ofthe relative sliding velocity (in ms
-1) of slider B with
respect to rigid link CD is(A) 0^
(B) 0.
(C) 1.
(D) 2.
Solution: From the dimension given,From the dimension given, angle ABC =
o velocity of crank at B = velocity of slider as AB isperpendicular to CDTherefore velocity of slider along CD =AB x 10 rad/s
=250 mm x10 rad/s = 2500 mm/s = 2.5 m/s
Answer : (D) 2.
Instantaneous center of rotation
-^ A link AB has moved
from A
Btooo^
AB. Its motion can be considerednn to have taken place in a number ofinfinitesimally small steps as shownin the figure. • Its motion from A
Bto Aoo^
Bcan be 11
considered as a pure rotation about a centre I. the location of the centre
Bo Bn
B^1
I
a centre I. the location of the centre can be obtained from direction ofthe velocities of the ends of the linkas shown. Such centre is called instantaneous centre of rotation
The location of the centre changesfrom instant to instant for differentpositions of the link and locus ofthese centres is called
centrode
Ao An
A^1
17
Where C is any point on the link.The angular velocities of various links can bedetermined easily using the above equation. Hence, the instantaneous centre method is simpler Hence, the instantaneous centre method is simpler than relative velocity method. than relative velocity method. when the directions are parallel , it becomes difficultto apply the method. But, relative velocity method issuitable for any configuration.
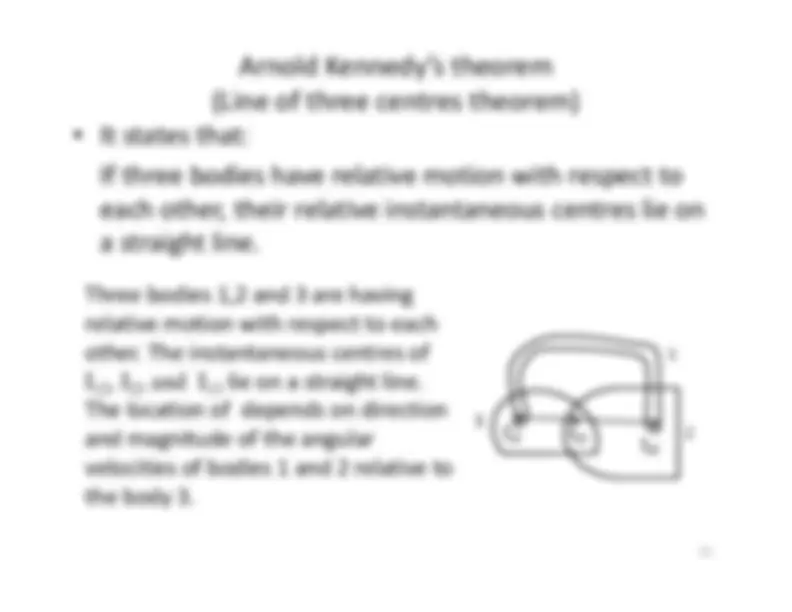
Instantaneous centres of different moving links^1
I^122
(^2) I (^121)
B^ A
VB 2
VA I^12 I^121
2 I^121
2 I^121